IMechE Challenge


Project Overview
As part of a collaborative engineering project, we developed a robot designed to autonomously climb a 2.2-meter vertical pipe. The objective was to complete the challenge in the shortest possible time while incorporating two five-second pauses at the midpoint, as per competition requirements. Our team focused on creating a compact, reliable, and performance-optimized design. The final prototype successfully met all functional criteria and outperformed competitors in regional qualifiers, earning a spot in the national finals.
Technical Skills
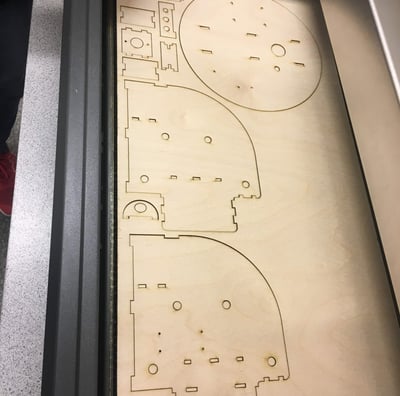
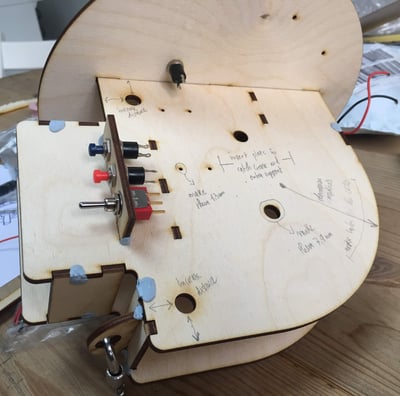
As part of the project, I applied a range of technical skills including 3D modeling using SolidWorks to design and refine the device for optimal performance and manufacturability. I performed theoretical calculations to determine key mechanical parameters such as torque requirements, structural balance, and appropriate wheel and gear dimensions. Additionally, I contributed to hands-on prototyping, assembly, and troubleshooting of mechanical components. Throughout the process, I collaborated closely with team members to iterate on the design and ensure the final build met all performance goals and competition criteria.
Challenges Encountered
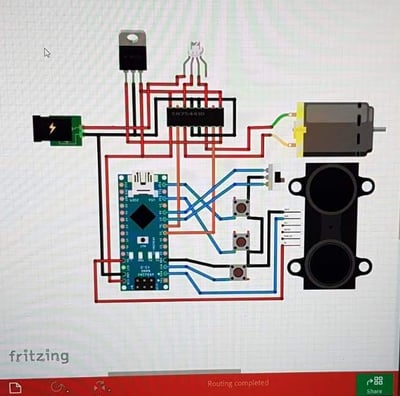
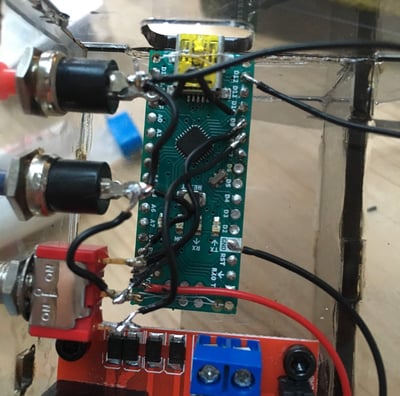
One of the key challenges faced during development was wheel slippage, especially during the initial ascent. This required iterative adjustments to the traction system by molding the wheel grip from a grippy silicon. Another issue was ensuring frame strength without significantly increasing the weight; early prototypes made from ply wood experienced slight flexing under load, which compromised stability and alignment. We addressed this by selecting stiffer materials like plastic and optimizing the frame geometry. Additionally, achieving accurate position detection for the mandatory 5-second stops proved difficult. We used a LiDAR sensor for distance measurement, but fine-tuning its precision to consistently identify the midpoint within an acceptable margin of error involved extensive calibration and testing.


Project Gallery